
In stark contrast to the common forms of weight training is isometric training, in which instead of moving weights the goal is to try as hard as you can and FAIL to move it.[1] This form of training has been shown to elicit increased strength development in some ways, and is often used in rehabilitation settings and is being used increasingly in recreation gym use. Unfortunately, these gains are also seen specifically in the joint angles that are trained. [1] This means that if you’re doing an isometric bicep curl with your elbow at 90 degrees, you’ll only develop strength at that 90 degree angle, not angles far from it.
To apply this training to the full range of joint motion, Isokinetic exercises can be used. Isokinetic exercises are exercises that are performed at constant speeds, regardless of how strongly one pushes or pulls. This allows for an isometric-like training across all joint angles. Studies have shown in some capacities isokinetic training leads to rapid growth, such as in jump athletes in which high speed isokinetic training had tenfold faster improvements when compared to other exercise groups[2].
In order to do isometric exercise, however, special exercise machines that move only at fixed speeds must be used. For elite training and physical training aspects, being able to regulate the speed as well as read out the force the user is applying to the machine to log their efforts. BIODEX is a company that designs isokinetic dynamometer exercise machines that do just that.
The Invention
- Patent Title:
- Muscle exercise and/or rehabilitation apparatus using linear motion
- Patent Number:
- US490777A
- Patent filing date:
- May 25, 1988
- Patent issue date:
- March 13, 1990
- How long it took:
- 22 months
- Inventors:
- Walter Gezari, Daniel Y. Gezari
- Assignee
- Biodex Corporation
- US Classification
- A63B21/154: Using flexible elements for reciprocating movements (ropes, chains, special pulley assemblies
- A63B21/0058 Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices using electromagnetic or electric force-resisters using motors
- Y10S482/90 Ergometer with feedback to load or with feedback comparison
- Y10S482/901 Exercise devices having computer circuitry
- How many Claims:
- 24
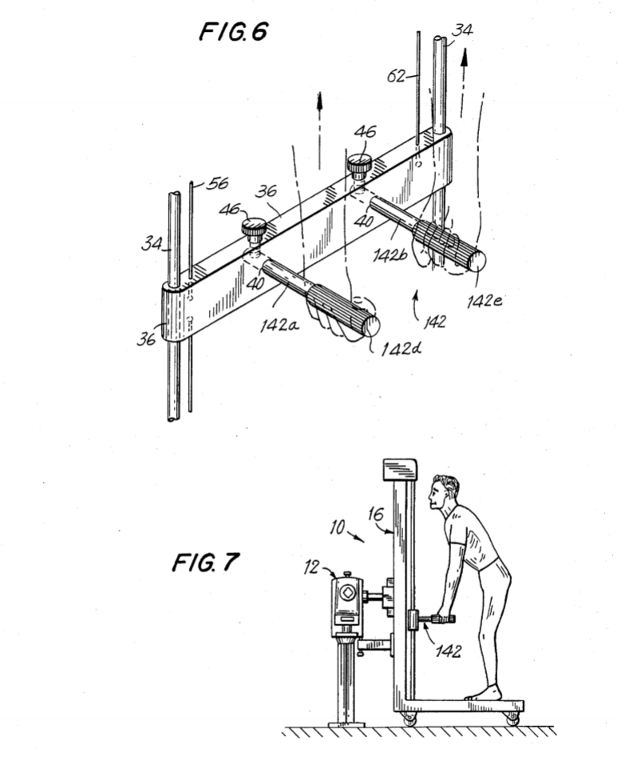
This invention is an isokinetic dynamometer exercise machine used to simulate a whole body lift, as often done in manual tasks at a workplace. For example lifting up a box and placing it on an overhead shelf. This is a common function and one that needs to be rehabbed in injured manual labor populations in which goals include returned to work, and having a machine that works specifically on that function can be useful. This more accurately replicates the stresses on the spine as well as supporting muscles, ligaments, and tendons than a surrogate exercise would.

The claims on this patent describe all parts of the physical apparatus. As can be seen in the image above, this includes the base on lockable wheels upon which the user stands on. The user then holds onto the handles and attempts to slide the bar up along two vertical guide poles. Ropes are rigidly fixed to the bottom and top of the bar and are held vertical by passing through pulleys directly above and below the bar. These pulleys redirect the rope towards a wheel, upon which it tightly winds around.
This effectively converts the linear motion of the bar and rope to the rotational motion of the wheel. There is a shaft that rotates along with this wheel which connects to a dynamometer and a servo motor to fulfill it’s claims of being able to measure the speed and force at which the user moves the bar as well as control the speed at which the user can move the bar. This dynamometer filed under a different patent (US4691694) and as such will not be covered in the context of this post.
But this dynamometer doesn’t actually read the force or the linear speed at which the user is moving the bar. It’s reading rotational measures: torque and angular velocity. This information needs to go through some postprocessing in order to get the linear values. As the radius of the wheel is known, the conversion is done by the following equations:
Force = Torque / Radius
Linear Velocity = angular velocity * radius
When the device is used for isokinetic motions in which the speed is controlled, the servo motor is engaged, which controls how the shaft and wheel rotate, therefore controlling the rope and the bar that the user is trying to lift. A servo motor is a motor that can rotate in both directions a certain amount at a certain angular velocity. This angular velocity is also calculated based the equations above and the desired linear speed set by the users.
Prior art has simulated the exercise of lifting as done in the workplace but they haven’t had any control systems for speed prior to this one. There have also been prior works that use servo motors to control rotational motions but not linear ones as lifting workplace items tends to be. The linear systems in the past have used other techniques that use force readouts of the person during exercise to determine the speed at which the exercise should be done, but these require complex systems with real time computation in order to function, and the motion may not be smooth as a result.
In comparison to these prior arts, this patent is novel in its ability to simulate linear loads in isokinetic ways, in being simple in doing so, and having a smooth motion in doing so as well.
Citations:
