
Identify
For physical therapists, one of the most important and sometimes most challenging aspects of their job is to track patient progress during rehabilitation from an injury or surgery. While most of this can be done based on patient reporting (such as 1-10 pain/discomfort scales) or qualitative therapist observations, they collect quantitative data whenever possible. One of the most common ways therapists can document progress is through strength testing. For larger muscles, such as the quad and hamstring, larger testing apparatuses, like the Biodex, are used to measure strength. These machines, however, are large and difficult to use. They can be oriented for smaller muscles but almost always therapists will opt for hand-held dynamometers. Over the years these dynamometers have developed from simple spring or strain gauge contraptions to sleek digitalized devices.
The RIHM (Rotterdam Intrinsic Handdynamo Meter)

Taheel Technology Hand- Held Electronic Dynamometer
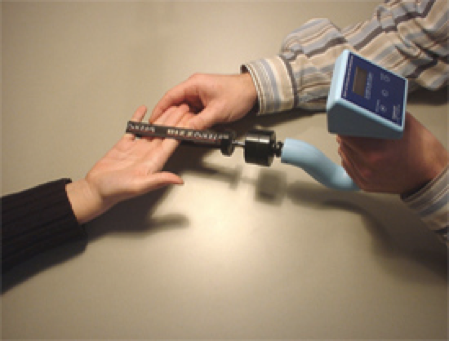
The above dynamometers are used to test grip strength and for the sake of explanation I will focus on this orientation., It is important to note that clinics often use the device shown below to measure strength of the arm and shoulder region since it allows for measurements to be taken in many different directions. For example, knowing the internal rotation and external rotation strength of a baseball players injured arm in comparison to his healthy one will allow the therapist to decide when the player should be allowed to return to play.

As I mentioned, all of these devices are designed on the seemingly simple basis of springs and strain gauges, Therefore, when designing a dynamometers the starting point is to decide what spring to use. If the spring constant is not stable and known, the device cannot be calibrated and will not result in accurate readings.
Formulate
For a grip strength dynamometer the patient pulls on a a handle connected to a spring of a known constant. Based on the displacement of the spring from it’s resting position the force they generated can be calculated. This force is a direct measure of grip strength. To decide the stiffness of the spring that should be used an engineer must use Hooke’s Law:

Hooke’s law states that the force of extension on the spring is proportional to the displacement of the spring.
The following assumptions can be used to calculate the max spring constant that should be used:
- Force (Fs)– According to a study done by Top End Sports the maximum grip strength the dynamometer must be able to withstand is 57.5 kg.
- Displacement (x)- Based on average hand sizes it can be assumed that the maximum displacement of the spring will not exceed 9 cm.
Fundamentally, stiffer springs have higher spring constants. For this reason, we know that the spring constant should be minimized, yet must be able to detect the max force and displacement it may experience. You essentially do not want to make it harder than it has to be for the patient.
Using these two assumptions and an understanding of Hooke’s Law it can be determined what the max spring constant that will be needed.
Solve
The following steps are used along with the assumed values to determine the ultimate spring constant:
F=-kx
57.5 N=-k(0.09 m)
k=-638.889 N/m
According to these calculations, a spring with a constant below approximately 640 N/m will suffice in your design of a handheld dynamometer.
Now it is important to understand the implications of the assumptions made here so your design can be altered for maximum efficiency. It is necessary to consider the patients that will be using your design. While the calculations above are generalized for average sized patients this may not fit your needs. For example, if your device will be used by pediatric patients the assumed values can be much lower whereas if your device will be used by athletic trainers in professional sports, the numbers should probably be increased.
The development of such dynamometers has been on the rise as their clinical prevalence has also risen. They are extremely beneficial to clinicians yet are based on such a simple engineering principle.
For more information on the benefits and design of dynamometry I encourage you to check out the following readings:
http://www.prohealthcareproducts.com/blog/handheld-dynamometers-and-manual-muscle-testing/
https://www.ncbi.nlm.nih.gov/pubmed/18796949
https://www.ncbi.nlm.nih.gov/pmc/articles/PMC2868792/
