Kinematic compatibility is a crucial criterion in the development of human-interacting robots, as it avoids unwanted interaction forces that may cause pain, injury, or perturbation of natural motion.
In anthropomorphic exoskeletons, complete kinematic compatibility can be achieved only with perfect alignment of robotic and anatomical joints. An alternative approach, is to include additional passive joints in the robot kinematic chain, enabling isostaticity, i.e. possibility of complete control of the addressed degrees-of-freedom (DOFs) via exchange of interaction forces that do not cause pain or discomfort to the user.
In such robots, perfect alignment is difficult as a consequence of the complex kinematic of the joint structure and high inter-subject variability of joint parameters. Guidelines for development of exoskeletons with a trade between low-impedance and torque transfer capability are then needed.
We have developed two wrist robot designs based on a cable differential transmission, to measure and assist wrist rotations about the flexion/extension (FE) and radial/ulnar deviation (RUD) axes. We have pursued two approaches to avoid such kinematic incompatibilities. One approach is based on adding passive DOFs to achieve isostasticity, the number of which was determined based on the Grubler-Kutzbach mobility criterion and confirmed by a kinematic analysis of the resulting parallel manipulator (Figure 1). The second approach involves a modification to the cable differential design to enable co-location of the wrist joint center with the robot’s center of rotation.
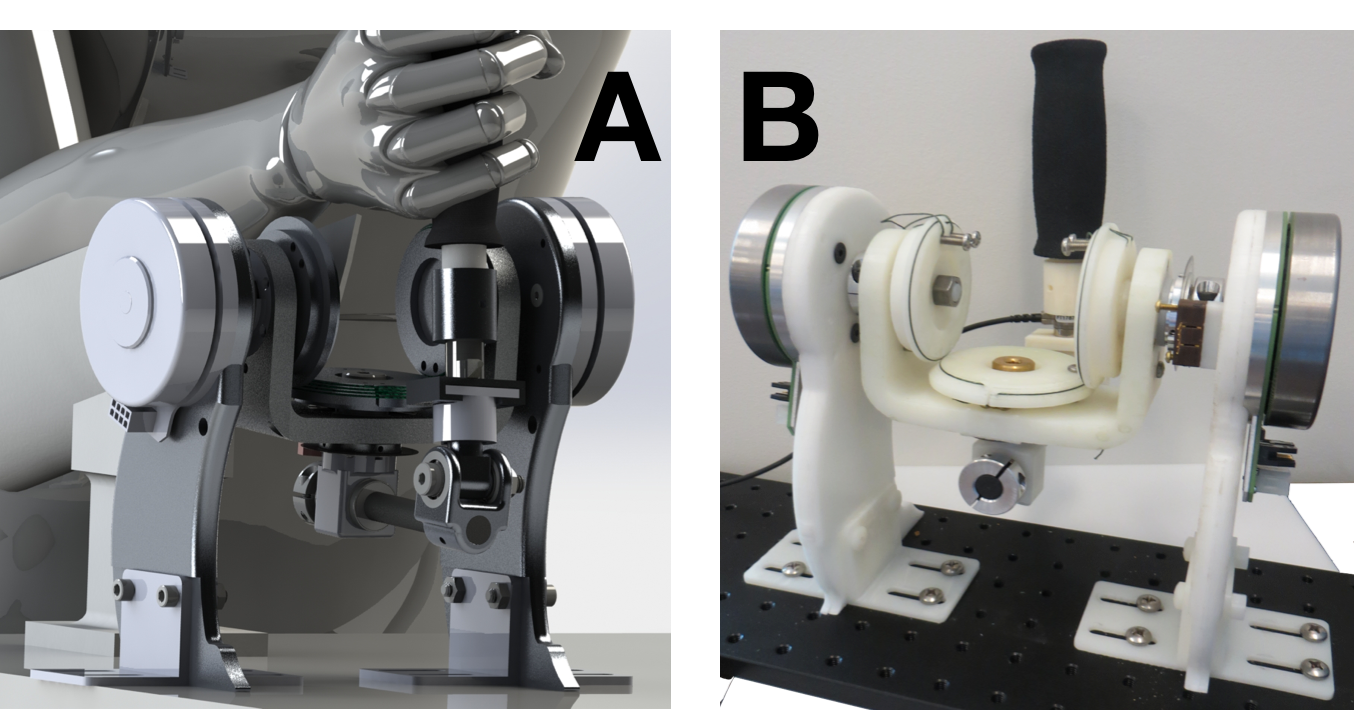
Figure 1: Design (A) and Prototype (B) of the UDiffWrist (non-colocated version).
